模擬技術補足資料缺口 車聯網/AI協力推動自駕升級
2024-04-08
新通訊
新聞來源:
邁向完全自駕的過程中,模擬技術不僅能夠提供車輛及周邊設施進行通訊的天線建模,也能透過模擬各種場景提供人工智慧/機器學習(AI/ML)系統充足資料。
透過高速無線網路基礎設施將資訊連接起來,使得資料可以被分析和共享,很可能將推動未來自動駕駛車輛的發展。要達到高度自主性(Autonomy),需要考慮幾個因素,包括先進的感測器技術、精準確定車輛位置、最新的地圖資訊、對其他車輛和行人的局部感知(Local Perception),以及規畫和決策的能力。隨著車輛自主性程度提升,這些因素的交互作用至關重要。根據統計機構Statista資料,2019約有3,100萬輛車輛以些微自動化程度運行;到2025年,全球新車銷量中將有近60%達到Level 2自主性。
從這個層面來看,目前針對完全自主汽車的實際進展仍然有限。此為龐大的運算任務,無疑將涉及大量需要接近即時回應的車載應用。所有這些活動都將由人工智慧(AI)和高水準的連接性協調支援,並且從安全驗證到現實世界的感測器和天線性能驗證,在各個方面皆得到模擬工具的支援。儘管整體車輛自主化程度還有待持續發展,目前可以確定的是,對車輛連接性、感測器感知、訊息共享以及訓練AI決策的先進模擬將對自主車輛的最終交付產生巨大影響。
車輛連接性開啟全新商機
在自動駕駛生態系統中,自動駕駛車輛(Autonomous Vehicle, AV)與其他元素之間需要進行許多對話,這些對話由車輛對車輛(Vehicle-to-vehicle, V2V)、車輛對基礎設施(Vehicle-to-infrastructure, V2I)、車輛對網路(Vehicle-to-network, V2N)、車輛對行人(Vehicle-to-people, V2P)以及車輛對一切(Vehicle-to-everything, V2X)的智慧技術所實現,以確保安全(圖1)。所有智慧技術都依賴一致的低延遲連接,以擴展感知範圍,超出車輛正前方的局限。在未來密集的5G及更高版本的通訊環境中尤其如此,在這樣的環境中,可以交換大量資訊。
圖1 負責道路互動的各種連接技術(V2V、V2P、V2N、V2I)
Ansys首席技術長Christophe Bianchi表示,未來完全自主的環境將由一個更大的通訊網路所主導,該網路將負責協調車輛移動。在城市中,車輛與城市及其他車輛進行交流,以幫助車輛完成安全移動至另一個地方的任務。那麼,該如何模擬環境中發生的所有事件,以及所需的通訊,包括不同參數之間的訊號品質?這就是數位任務工程軟體的任務。
當然,現在已經可以開始看到一些智慧互動的實現,例如Autotalks,其為一個小型裝置,可連接到自行車的把手,以避免碰撞風險,而這只是V2X連接性的其中一個案例。該系統連接到車輛和相關的車輛基礎設施,作為更廣泛的移動生態系統的一部分,因此所有車輛(包括自行車),在即時監控交通並共享關鍵資訊的過程中,將與基礎設施和彼此進行通訊。
可靠的服務和覆蓋率是衡量Autotalks和其他連接技術成功的重要指標。模擬技術使得5G設計人員能夠實現這些目標,幫助他們準確模擬毫米波和波束成形天線的真實世界效能,優化混合訊號系統單晶片(SoC)和應用處理器的功耗、效能和成本。此外,透過晶片-封裝-系統、電熱和熱機械分析,也能夠提升產品的可靠度。以Ansys的解決方案為例,Ansys傑出工程師Larry Williams表示,該公司可為整個5G生態系統帶來可靠度和效能,許多5G業者正在使用Ansys的半導體和多物理模擬工具以及工作流程,以大規模交付5G連接性。
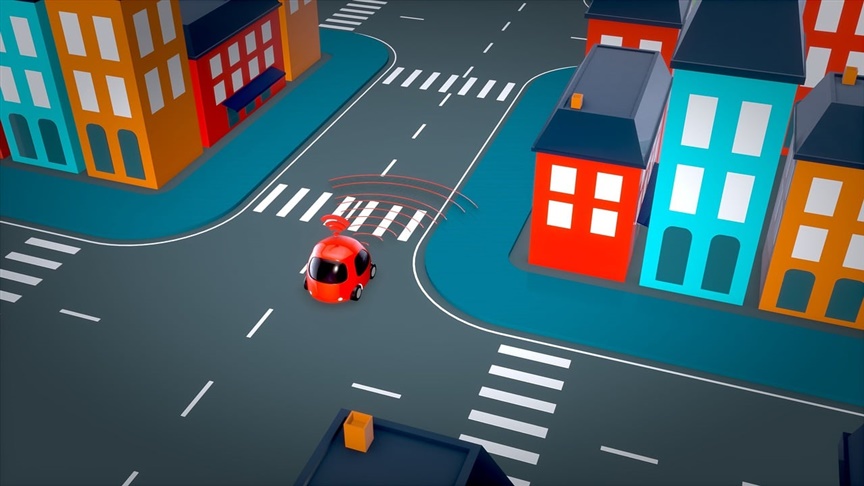
圖2採用Ansys HFSS,舉例說明建模和模擬解決方案將如何為自駕車V2X通訊提供支援。圖2中顯示,當一輛車開到十字路口時,需要迅速確認交通號誌即將變換(V2I),以及其他車輛的意圖(V2V),以計算出最安全的避讓動作。圖中的斑點代表各種天線的輻射模式。
圖2 Ansys HFSS顯示各種天線的輻射模式
自動駕駛技術的採用還將引發產業的典範轉移,從車輛擁有權(Ownership)到使用體驗(Usership)。認知到如此轉變,原始設備製造商(OEM)和移動供應商(Mobility Supplier)正試圖透過更詳盡的服務模型創建可循環的收入來源。為了實現此目標,需要能夠與使用者(即客戶/駕駛)保持連接。持續與客戶/司機進行位置和行程共享,有助供應商提出客製化的服務建議,進而開啟額外的收入來源和機會。
因此,除了確保自動駕駛的行車安全,車輛連接能力也是全新業務模式的背後推力。數位互動所產生的大量資訊,例如對車輛健康狀況或駕駛偏好的即時洞察,將被OEM以子服務或訂閱的形式作為商業化服務提供。模擬將成為優化新連接體驗的關鍵推動者,除了車輛自主性,也適用於電池管理系統等車輛子系統。
Ansys的首席技術長Christophe Bianchi舉例,未來,透過建立混合數位分身模型,將模擬模型以及在雲端或邊緣運行的即時感測器資訊相結合,可為OEM提供準確的電池內部狀況圖,業者將能了解整個電池組的現況,並預測或檢測到可能導致充電不良的故障,再透過服務警報立即通知使用者。
模擬技術加速AI/ML自駕系統成熟
人工智慧依賴資料,這對汽車產業來說是件好事,資料驅動的洞察力加上機器學習(ML),已經加速了自駕技術的發展。與先進駕駛輔助系統(ADAS)和自主應用相關的一項重大挑戰是,人工智慧/機器學習(AI/ML)需要一個涵蓋所有邊緣情況的大規模資料集,並與基於規則的系統協同工作,以實現更好的效能。
最終,透過AI/ML驅動的決策系統與自駕車基於規則的系統密切合作,使得在真實駕駛環境中安全操作的複雜性成為安全的首要考量。有時,AI/ML系統會計算駕駛操作的風險得分,為AI/ML系統提供必要的控制權以進行決策。
Ansys研發資深主管Jay Pathak表示,在汽車領域的AI/ML中,其中一項關鍵挑戰是,當資料未能完全涵蓋整個空間時,將不容易發覺並建立相關規則。在道路上,有多種因素在發揮作用,任何路上互動產生的資料集都是這些環境因素共同作用所產生的結果,因此,我們難以獨立取得各個因素的資料。這為汽車機器學習帶來巨大的挑戰。
認知到AI/ML解決上述問題的潛力十分重要。儘管Mercedes-Benz等OEM廠商在支援ADAS驗證方面取得了進展,目前卻仍尚未達到能夠提供支援完全自主所需資料的成熟水準。為了達成這項目標,需要從大數據(Big Data)轉向實用資料(Useful Data),並藉由模擬技術生成現實中難以蒐集到的情境資料,以此增強資料集的豐富程度,進而提升非監督學習(Unsupervised Learning)的成效。
要迎接這些挑戰,業者需要找到一種巧妙的方式,將機器學習引入在具有多種道路干擾的環境中運行的系統之中,以從系統中發現許多規則。OEM廠商正在大量使用模擬和非線性求解器來引導形成此感知水準的資料。與自動駕駛功能相關的所有獨立挑戰必須被分解為多個子任務,這些子任務可以使用針對各個不同面向的模擬器,透過模擬來解決,並根據來自光達、雷達和感測器的資料形成感知資訊。
AI/ML正產生深遠影響的另一個領域,是對現實世界駕駛地圖和地面真實感測器資料進行標註。除了準確標註地圖,AI/ML引擎也能用來對感知演算法進行訓練和壓力測試,使用詳細、經過分類和彩色編碼的地圖資料,進而產生穩健的感知結果和增強的安全性。
隨著業界致力於實現全自動駕駛,未來的車輛將展現全新面貌。由於未來車輛必須在設計時將感測器整合列入考量,特定的結構變化將影響形成車輛感知的資料蒐集系統的重新定位。舉例來說,整合在前儀表板後方的雷達必須能夠讓毫米波訊號穿過儀表板,而不受油漆和其他材料的干擾。在虛擬模擬環境中,可以快速有效地針對這些情況進行分析。
(本文作者皆任職於Ansys)